

AgriCobIoT project
This project focuses on the development of two mobile robots to collaborate and cooperate in a greenhouse. In this connection, the automation, robotics and mechatronics group is positioned as a benchmark in mobile robotics in greenhouses, maintaining a great track record in the sector.
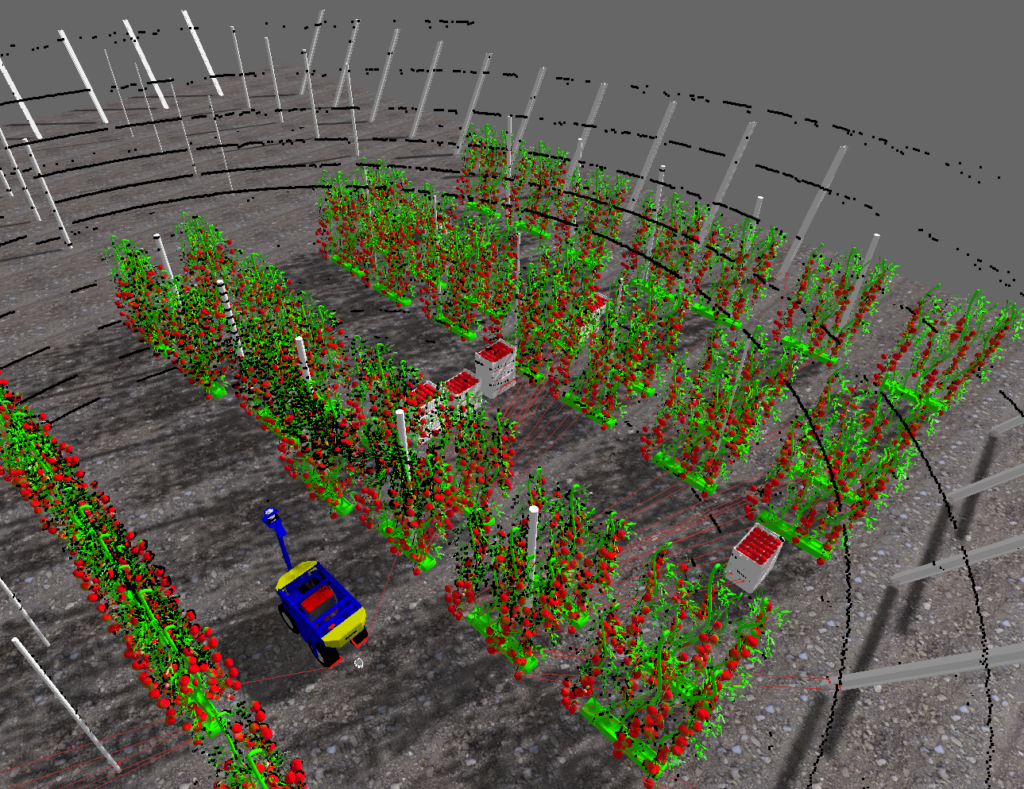
Autonomous navigation
Navigation algorithms are developed based on techniques such as Visual SLAM, Lidar Odometry and Mapping (LOAM) or Dead Reckoning.
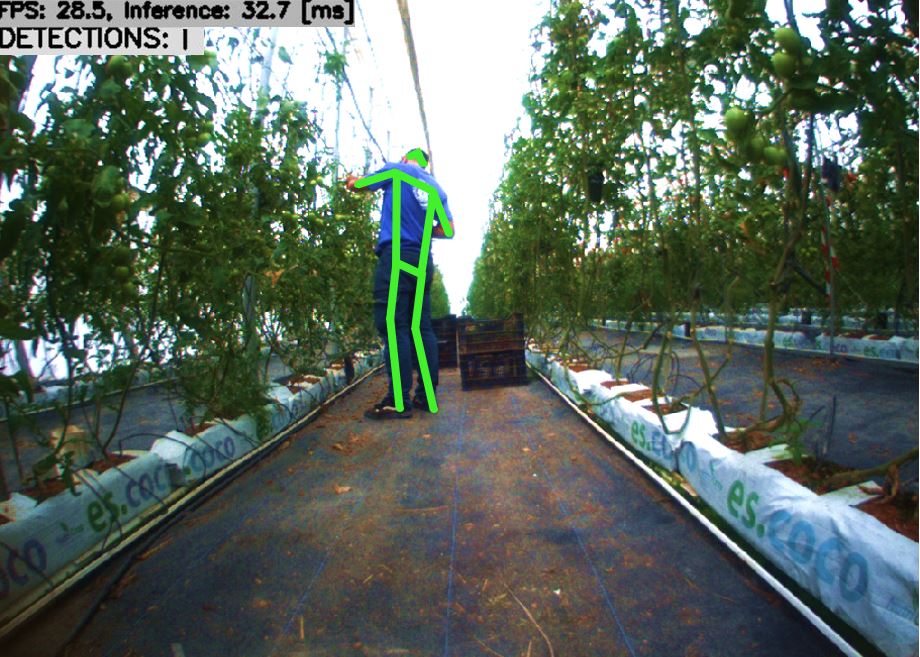
Collaborative robotics
Collaborative robots are developed that are able to work together with farmers in the various harvesting and supervision tasks.