This group of tools illustrates the relationship between physical models and the main elements of models used in controller design (transfer functions), such as poles, zeros and time response. The parameters of the nonlinear physical models discussed in Chapter 2 of the book are related to those of the linearized models.
The tank level system transfer function
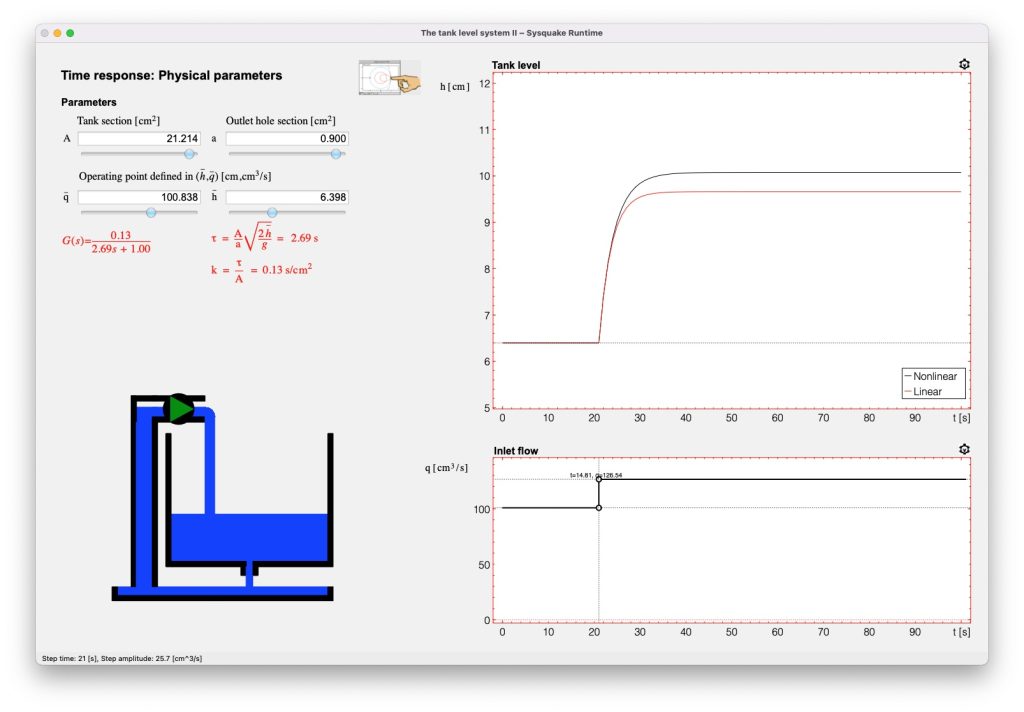

In the application described in the interactive tool it is possible to compare the time response of the open-loop system obtained with the nonlinear model with that from the linearized system. The first-order transfer function that describes the linearized system is also shown, as well as the relationship between the parameters of the physical system and those of the transfer function (static gain and time constant). The tool also allows analysis at different operating points and with different tank geometries. This provides quantitative and qualitative information on the validity interval of these models. System parameters can be changed by interacting with the geometric description of the tank.
Variable section tank level system transfer function
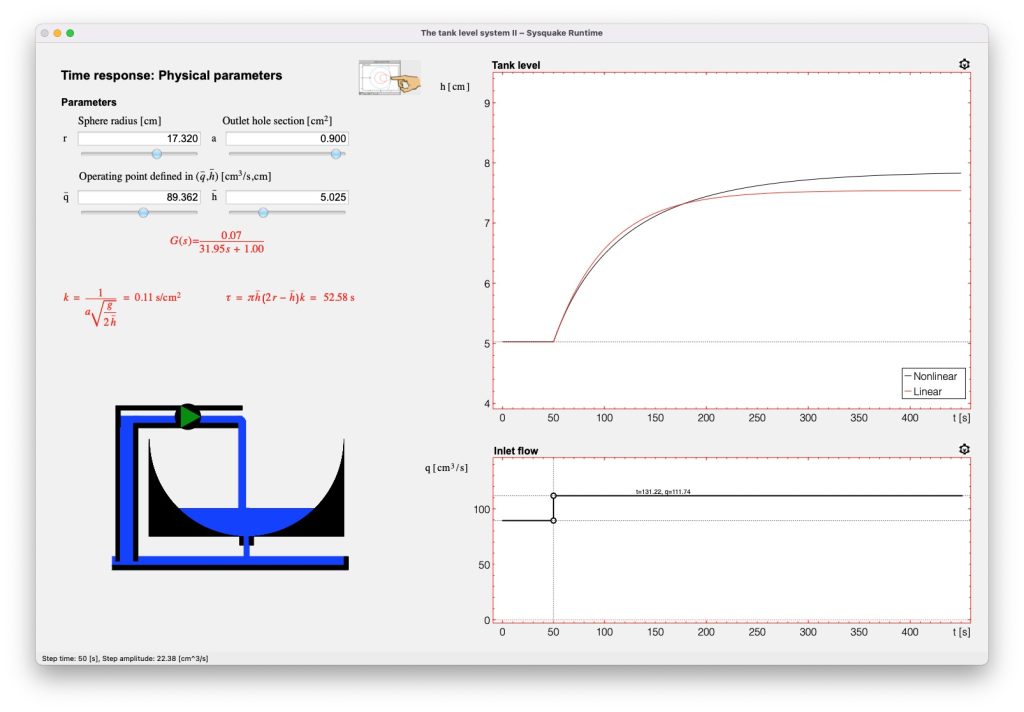
This interactive tool is the same as that presented in the Nonlinear Models section, but includes a symbolic representation of the transfer function so that, the relationship of the static gain and time constant can be directly linked to the model parameters and selected operating point. Steps responses are also shown.