The main techniques for analyzing the stability of closed-loop linear systems are introduced: Root locus, Nyquist criterion and phase and gain margins. An interactive tool is also included to illustrate the limitations imposed by the time delay in a feedback loop.
Root locus


The main objective of this tool is to analyze the root locus of negative feedback linear systems for K ≥ 0, but also for systems with κ < 0 providing the equivalent to a positive feedback (negative gain) root locus. The interactive tool allows the user to understand the main underlying concepts and to visualize the elements that usually help the user to construct the root locus: asymptotes, centroids, departure and arrival angles, and others. Moreover, it is very useful to analyze and visualize the effect of including open-loop poles and zeros on the location of closed-loop poles, being a powerful tool for controllers’ structure selection.
The Nyquist stability criterion

This interactive tool is devoted to graphically understanding the Nyquist criterion and how the stability of the closed-loop system can be analyzed based on the open- loop transfer function and by the application of Cauchy’s theorem. As pointed out in the book, the application of the Nyquist criterion to systems with j-axis poles and/or zeros is not dealt with adequately by existing software and no canonical rule for the precise and analytical construction of the plot if found in the literature of control engineering. In this tool, an attempt has been made to find a tradeoff between visu- alization and conceptualization, trying to preserve the spirit of classic books by selecting appropriate use cases and a representation of the contours at infinity. Due to the fact that it is quite difficult to represent contours at infinity, the internal parameters have been hidden to the user, while constraining the possible cases for analysis to twenty-nine (which cover mostly all reasonable cases).
Phase and gain margins

In this tool the basic concept of phase margin and gain margin are analyzed through examples and using the different representations in the frequency domain: Bode, Nyquist and Nichols diagrams. Although the time delay has a fundamental influence on these relative stability margins, this tool does not incorporate the option to include time delay in the transfer function which describes the dynamics of the systems studied, since a specific tool has been developed to analyze the time delay limitations in closed-loop systems, which is explained in the next section.
Limitations imposed by time delay in closed-loop systems
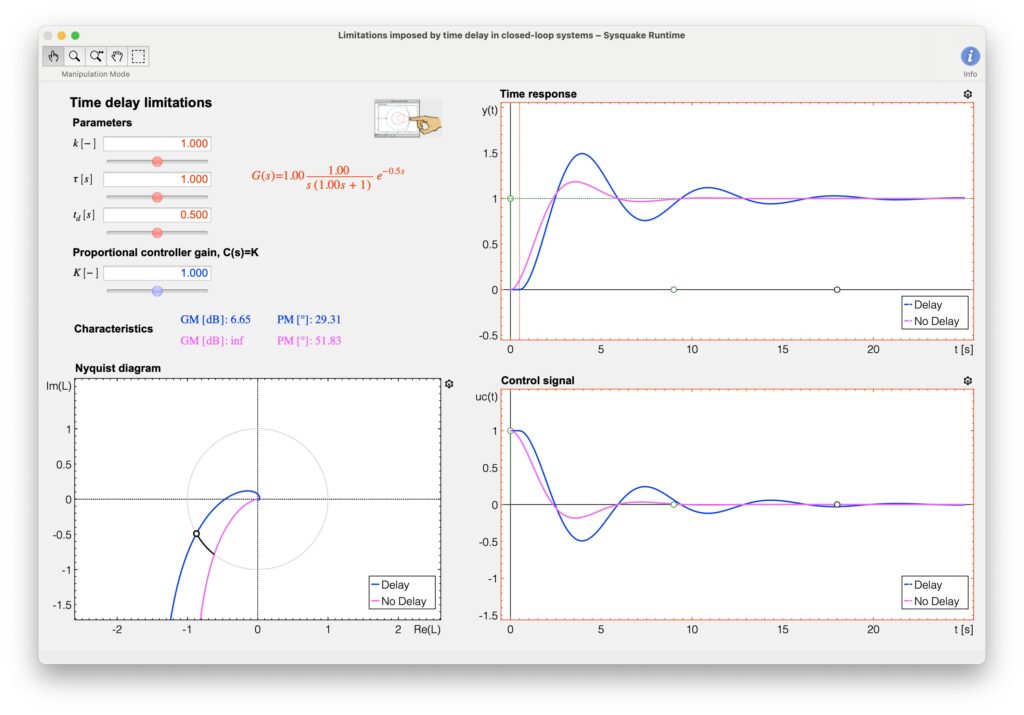
This tool is devoted to analyzing the influence of the presence of time delay in the open-loop transfer function in the closed-loop stability and performance. The Nyquist diagram is used as main frequency domain representation, also analyzing the effects on the closed-loop time response to a step reference and the influence of load disturbances and noise. In this interactive tool, a fixed transfer function in the form of a second-order system with an integrator and time delay is only considered. The reason for the choice is that it constitutes a system where it is very easy to visually analyze the influence of the time delay on the closed-loop stability and performance, that are the main concepts to explore.