
The electric vehicle of the Universidad de Almería (eCARM) consists of an urban electric car that has been adapted for automated control. The prototype features a 48 volt DC-motor and 8 gel-batteries. Its batteries system ensures autonomy of 90 km at a maximum travel speed of about 45 km/h. In its current form, the prototype features full manual control and semi-autonomous mode (only autonomous thrust control is fully implemented). It has two embedded computers. Regarding power consumption, basic sensors are installed.
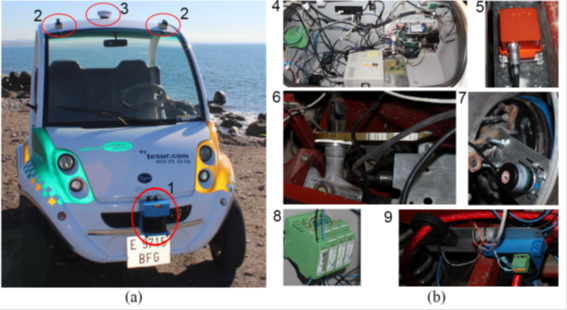
(a) Visible sensors marked in red, and (b) close-ups of the rest of sensors. Labeled devices are: (1) Sick LMS-200, (2) PGR Flea3 USB3 monocular cameras, (3) GPS antenna, (4) embedded computers in the car trunk, (5) IMU system, (6) steering-wheel encoder, (7) rear wheels encoders, (8) voltage and (9) current sensors.
The eCARM can be considered as a good test-bed for the study of a hierarchical predictive control as it involves i) Different time scales: integration of typical process of ms inherent to the communications with sensors and actuators and also to the variables related to models of demand of mobility or load which need of wider scales of time. ii) Constraints: The battery capacity, the acceleration required, or the priority of the use for mobility needed. iii) Predictions: forecasting methods for the prediction of the renewable generation, for the load or the prediction of mobility patterns.